





4 、縱穩(wěn)性
與普通排水型船不同,因為小型快艇的L/B相對較小,導致縱穩(wěn)心半徑小,據(jù)統(tǒng)計艇長在10m以下的游艇,其H/LW=1.1~1.6(H--縱向初穩(wěn)性高;LW—水線長),因此保證縱向穩(wěn)性是小型快艇設計中的一個重要問題。
應適當減小FRP游艇的進水角,并使浮心位置后移,這對減小剩余阻力是有利的。為了減少高速艇的“海豚”現(xiàn)象,建議適當?shù)匕阎匦耐耙葡蛲?,浮心位置應位于重心之后附近,使游艇在靜水中處于輕微首傾,在航行中隨著速度的提高,浸水線不斷向后縮短,浮心逐漸后移與水動力所產(chǎn)生的升力作用線合成使游艇首部抬起,這時不至于因升力作用點沿縱向變化而遠離重心發(fā)生過大的縱向搖擺,即有利于縱向穩(wěn)性。筆者對艇長在10m以下的小型游艇的浮心縱向位置LCB進行了統(tǒng)計,其取值范圍在舯后(7%~10%)L。
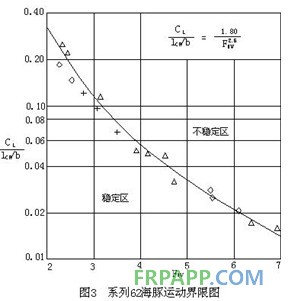
對于深V型滑行艇,建議使用文獻[6]提供的計算方法??巳R門特(Clement)將62系 

4、快速性
過渡型快艇的棱形系數(shù)Cp值的選取與設計航速有關。一般按略小于“理論最佳棱形系數(shù)”的原則選定。這是因為這種艇的經(jīng)常使用速度往往低于設計速度。取略小于最佳的棱形系數(shù),對阻力性能是有利的,相反的如果取“最佳值”,使艇經(jīng)常處于不利狀態(tài)下。
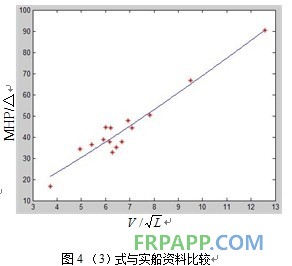
航速粗估在設計工作和營運工作中都是比較重要的,根據(jù)統(tǒng)計并回歸,游艇航速與主機功率存在如下關系:
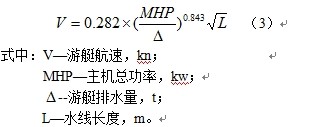
若將估算航速的(3)式與游艇資料繪制成圖4,能很好地反映游艇的關系










 魯ICP備2021047099號
魯ICP備2021047099號